Computing the convex hull is a preprocessing step to many geometric algorithms and is the most important elementary problem in computational geometry, according to Steven Skiena in the Algorithm Design Manual.
Graham scan algorithm
This algorithm is pretty straightforward to learn.
You may have heard that you can use sorting to find a convex hull and wondered how and where sorting would come into play.
The basic idea
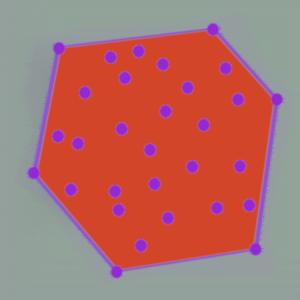
Initialize an empty stack that will contain the convex hull points.
Pick a starting point and add it to the stack.
Sort the rest of the points in counterclockwise order around the starting point.
Sweep through the sorted points.
Initially add each new point to the stack and then check to make sure that the hull is still convex with the new point.
Delete any points that create concave angles - these points lie inside of the hull.
Python implementation of the Graham scan algorithm
Now we can sweep through the points in a counterclockwise direction.
Add each point to the hull stack initially, and then we check to make sure the three points making up each new corner of the polygon create a convex angle.
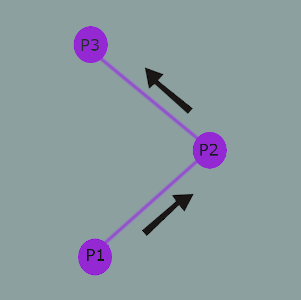
Once there are at least 3 points in the stack, we start looking at each triplet of points from the current point to the previous two points in the stack hull[-3:].
Call them p1, p2 and p3, with p3 being the current point we're looking at.
The points create two vectors p1 -> p2 and p2 -> p3.
Since we are sweeping in a counterclockwise direction, we want to rotate left to get to the current point from the previous two points.
Rotating left means that this corner of the convex hull polygon we are forming is, indeed, convex, and as we know, all of the corners of the convex hull need to be convex.
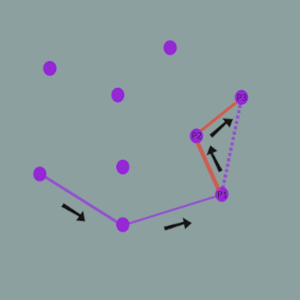
We can find out the rotation direction by computing the cross product of the vectors created by p1, p2 and p3.
If the result is negative, then the three points are rotating right in a clockwise direction, which would add a concave angle to the polygon, so we want to get rid of the second point, p2, because it lies inside the convex hull.
After removing P2 from the stack, check to make sure the new triplet in hull[-3:] rotates left - if it still rotates right, keep removing the middle point until the triplet rotates left.
while len(hull) > 2 and get_cross_product(hull[-3],hull[-2],hull[-1]) < 0:
hull.pop(-2)
If the cross product is zero, meaning the points are in a straight line or collinear, it's up to you and your project requirements whether or not you want to keep or drop the point.
Then move on to the next point in the sweep.
When the sweep is done, the points that remain in hull are the points that form the convex hull.
Computing the convex hull in higher dimensions
The gift wrapping algorithm is typically used for finding the convex hull in a higher dimensional space.
In the 2-D case, this algorithm is known as the Jarvis march.
Python libraries
Here are a few options for computing convex hulls in your projects.
Face-swapping apps. This face-swap tutorial for OpenCV, shows how you can use the convex hull of various facial landmarks in images to determine the face boundary.
In video game simulations where you are dealing with object collisions, you might represent a concave object by its convex hull. Here is an interesting post on that.
Cooking - in this ingredient polyhedron, the ingredient proportions within the convex hull are proportions that will work for a recipe.
Thanks for reading!
As always, let me know if you have questions or comments by writing them below or reaching out to me on Twitter @LVNGD.
Starting out with general purpose computing on the GPU, we are going to write a WebGPU compute shader to compute Morton Codes from an array of 3-D coordinates. This is the first step to detecting collisions between pairs of points.
In this post, I am dipping my toes into the world of compute shaders in WebGPU. This is the first of a series on building a particle simulation with collision detection using the GPU.
Finding the Lowest Common Ancestor of a pair of nodes in a tree can be helpful in a variety of problems in areas such as information retrieval, where it is used with suffix trees for string matching. Read on for the basics of this in Python.